更多资料请访问 www.liruan.net
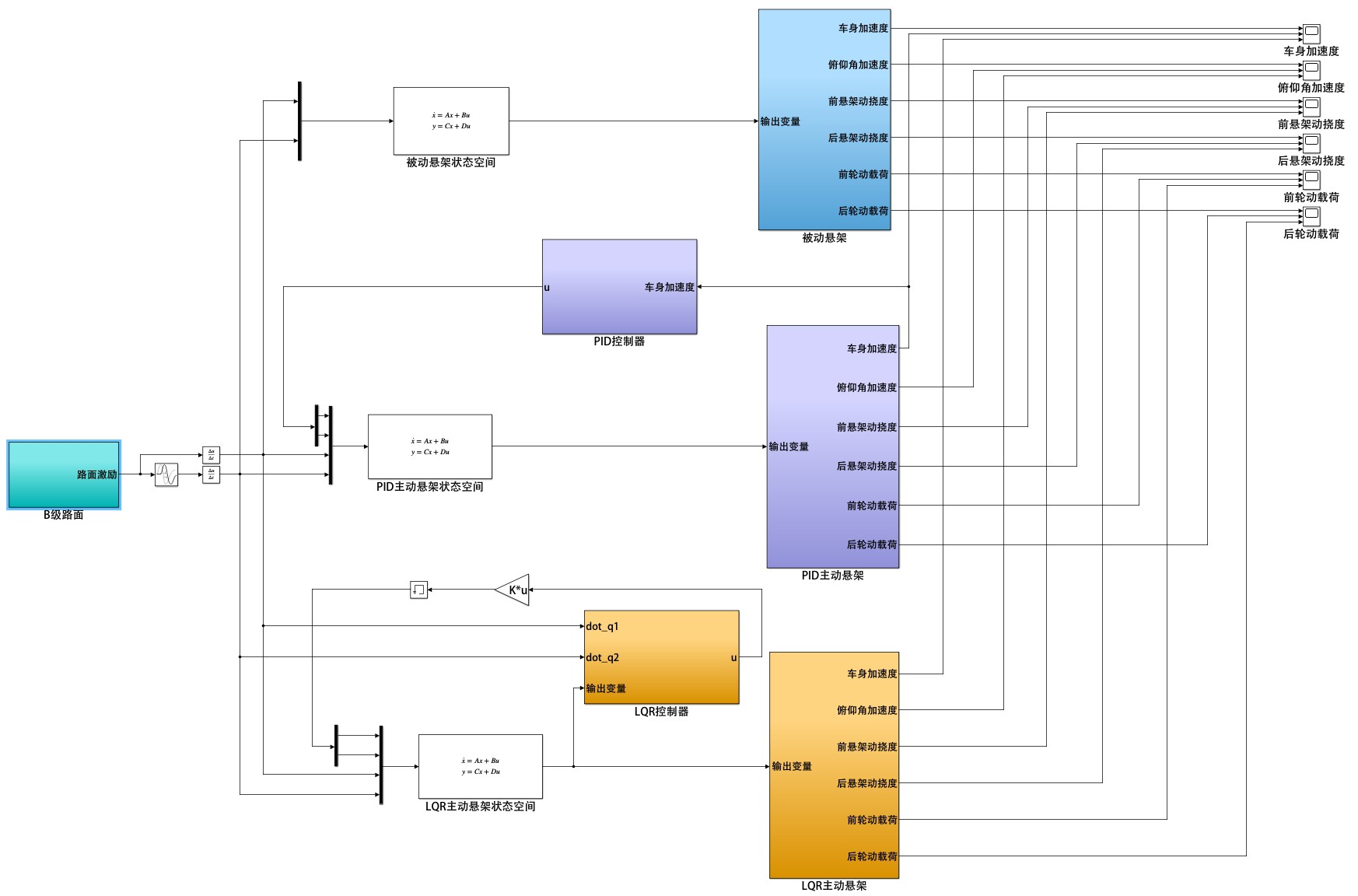
【PID和LQR主动悬架模型对比】
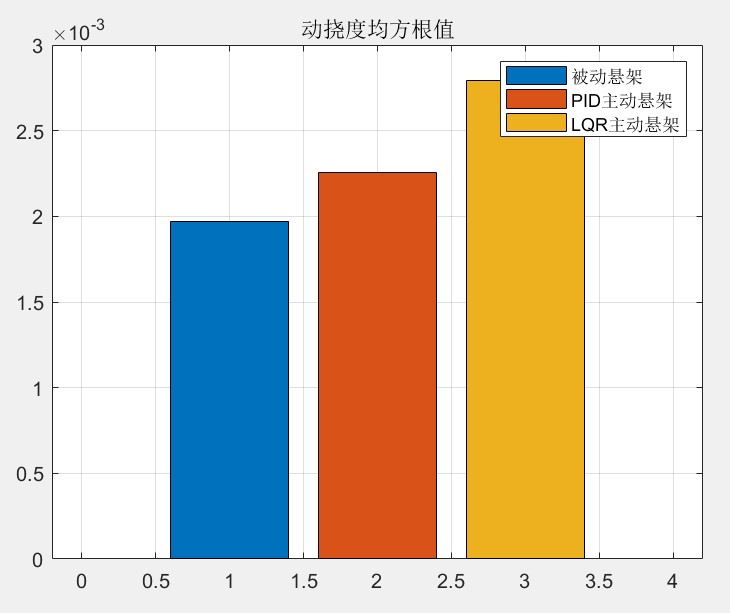
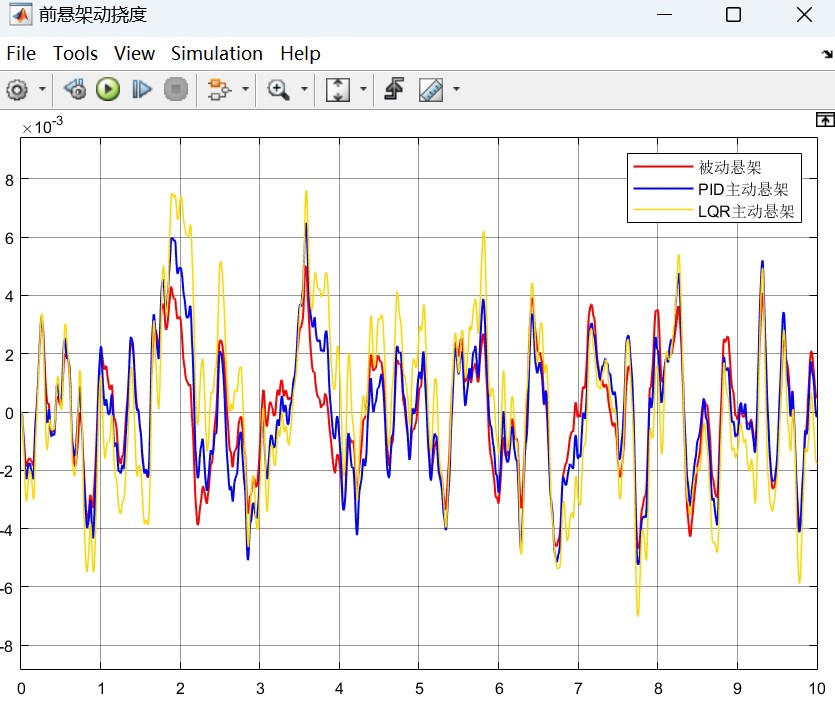
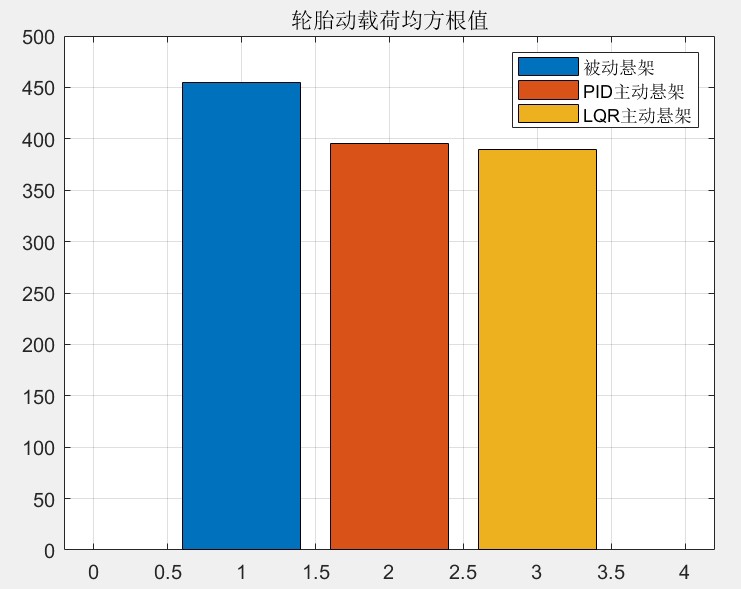
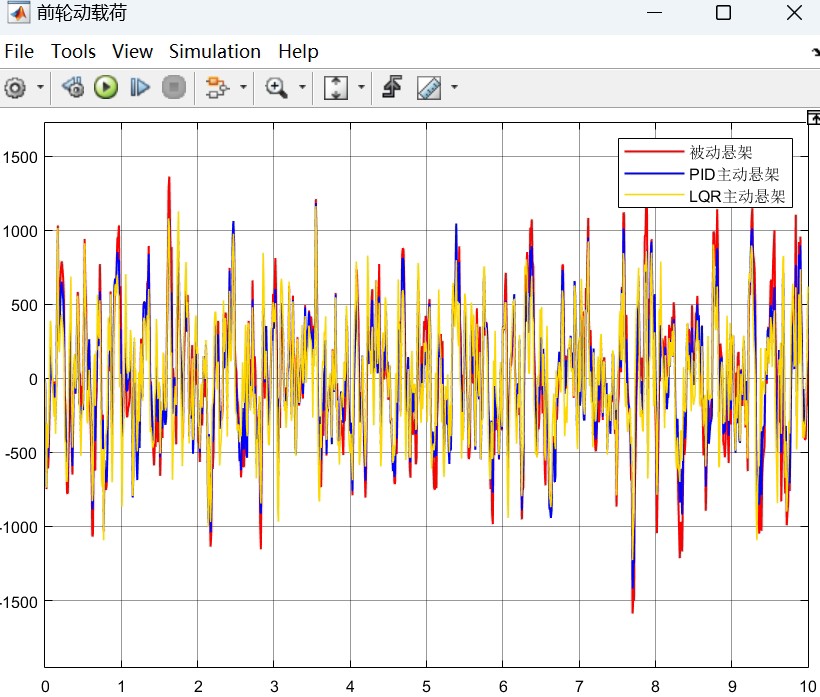
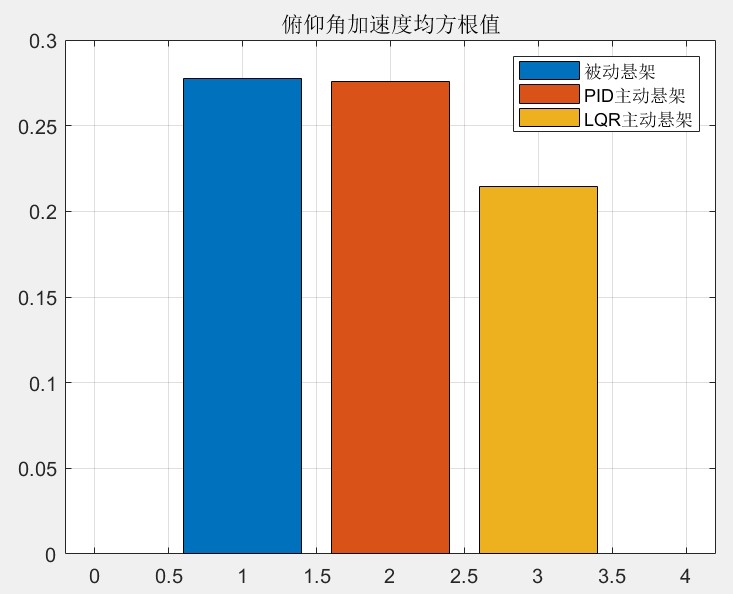
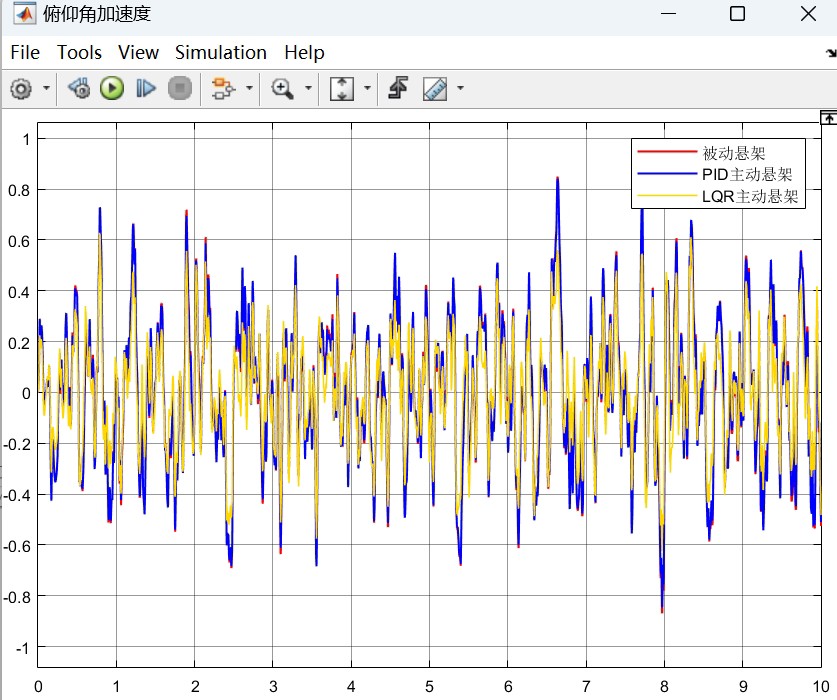
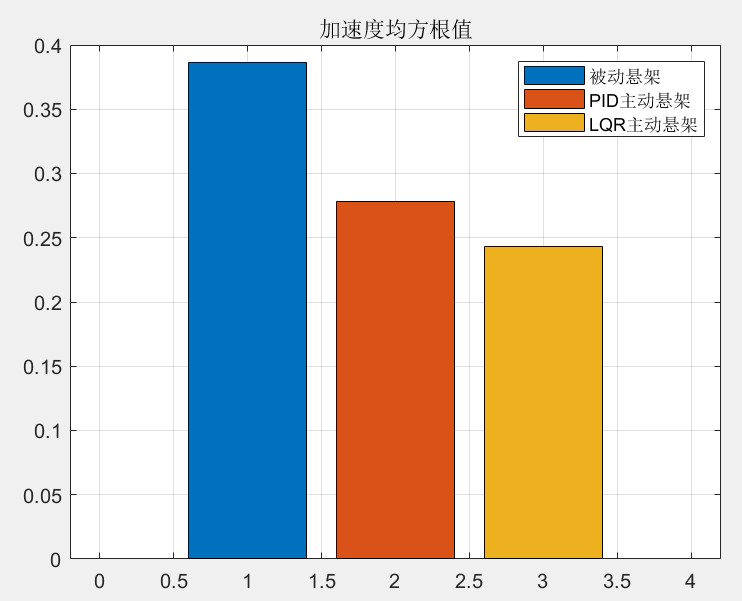
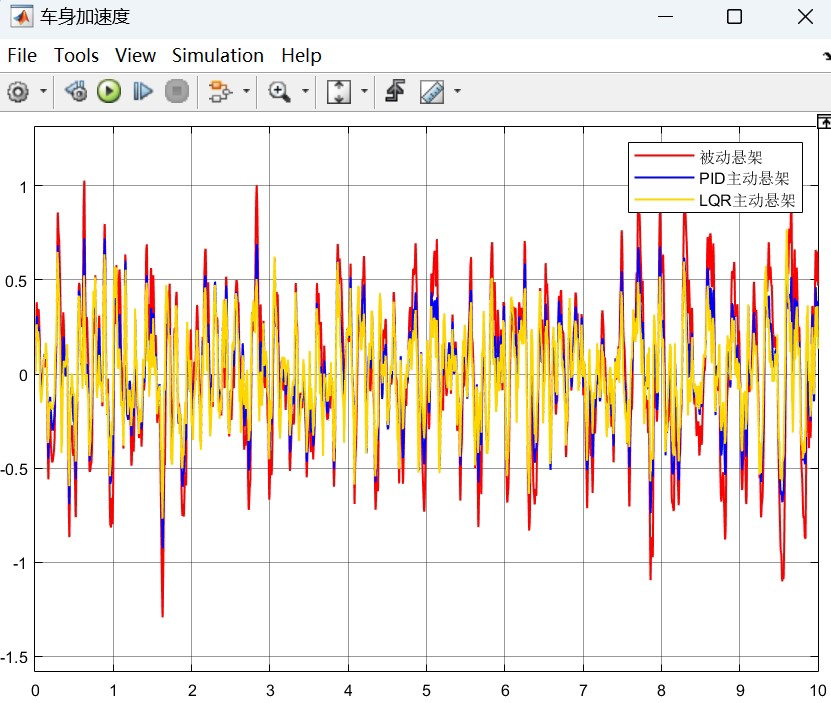
分别建立了PID控制和LQR控制的的主动悬架模型,比较两种控制器的控制效果。
以悬架主动力为控制目标,输入为B级随机路面,输出为车身垂向加速度、俯仰角加速度、悬架动挠度等平顺性评价指标,可做汽车平顺性仿真。
二自由度(1/4)车辆模型:r360.
四自由度(1/2)车辆模型:r550.
内容包括模型所有源文件,说明文档和参考资料
【联系 微信shujuqudong1或shujuqudong6 QQ68823886或QQ27699885】
ID:32120709404794401